Yoonyoung Cho
I'm a Ph.D student at KAIST IM^2, where I work on developing intelligent AI algorithms for robot manipulation. Currently, my research focuses on generalizable non-prehensile robot manipulation, where a robot can manipulate general objects of arbitrary geometry to target configurations.
Yoonyoung Cho is a Ph.D student at KAIST IM^2, working with a small team on Nonprehensile robot manipulation. He received his undergrad at Olin College on Engineering with Robotics Concentration. Published papers at IROS'22, ICRA'24, ICLR'24.
Github G. Scholar LinkedIn
yoonyoung dot cho at kaist dot ac dot kr

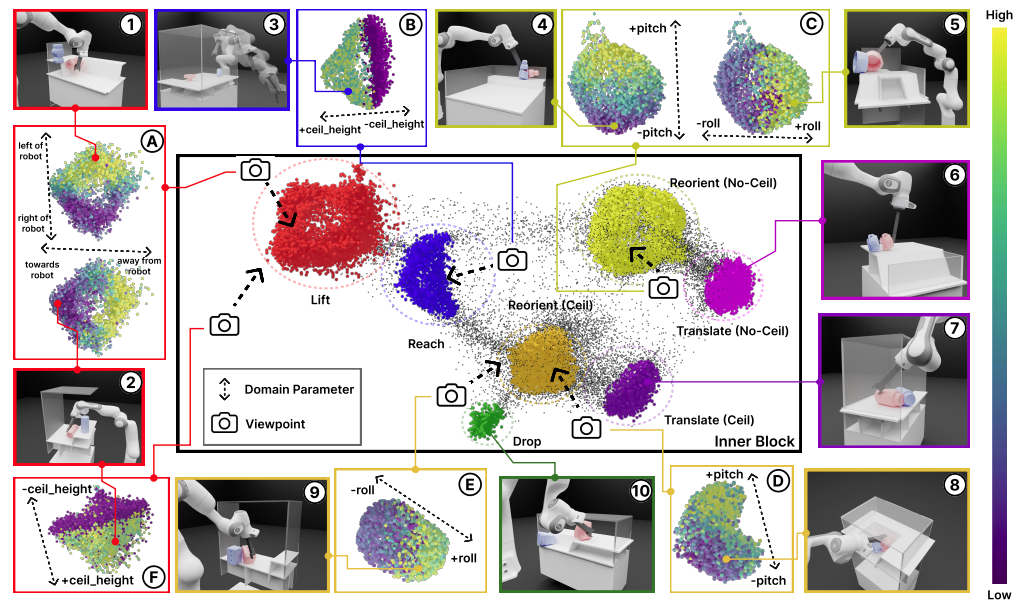
Hierarchical and Modular Network on Non-prehensile Manipulation in General Environments
Yoonyoung Cho*, Junhyek Han*, Jisu Han, Beomjoon Kim
Robotics: Science and Systems (RSS), 2025.
Webpage •
PDF
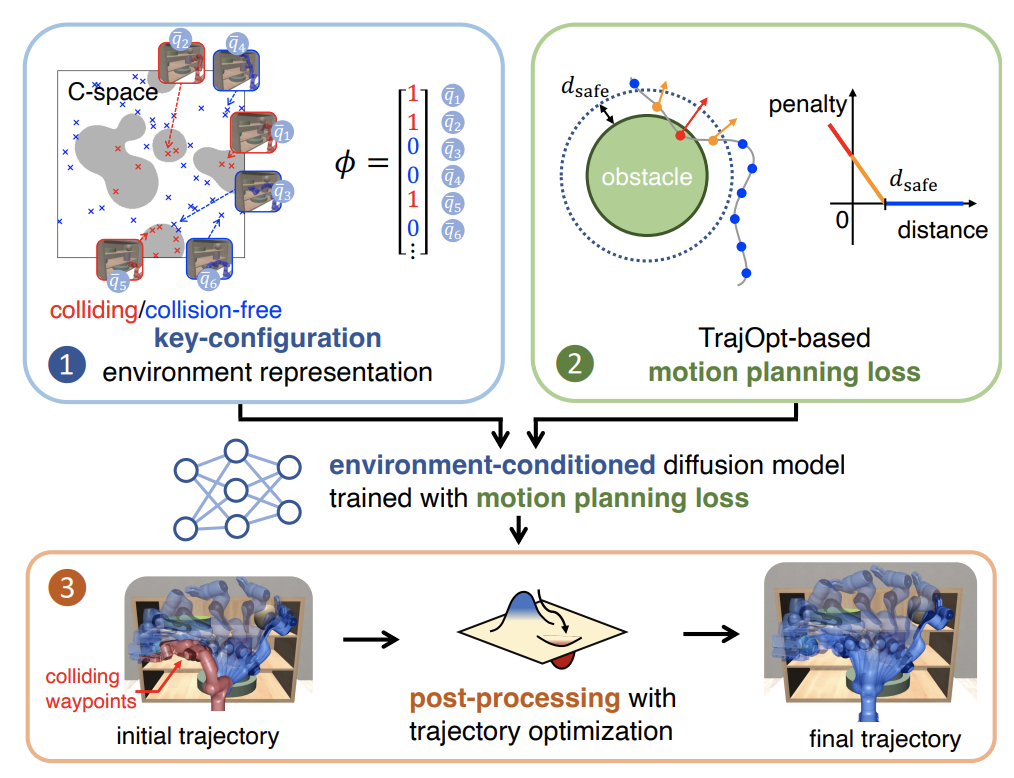
PRESTO: Fast motion planning using diffusion models based on key-configuration environment representation
Mingyo Seo*, Yoonyoung Cho*, Yoonchang Sung, Peter Stone, Yuke Zhu, Beomjoon Kim
International Conference on Robotics and Automation (ICRA), 2025.
Webpage •
Github •
PDF

CORN: Contact-based Object Representation for Nonprehensile Manipulation of General Unseen Objects
Yoonyoung Cho, Junhyek Han, Yoontae Cho, Beomjoon Kim
International Conference on Learning Representations (ICLR), 2024.
Webpage •
Github •
PDF
Open x-embodiment: Robotic learning datasets and RT-x models
Open X-Embodiment Collaboration
International Conference on Robotics and Automation (ICRA), 2024.
Webpage •
Github •
Dataset •
PDF
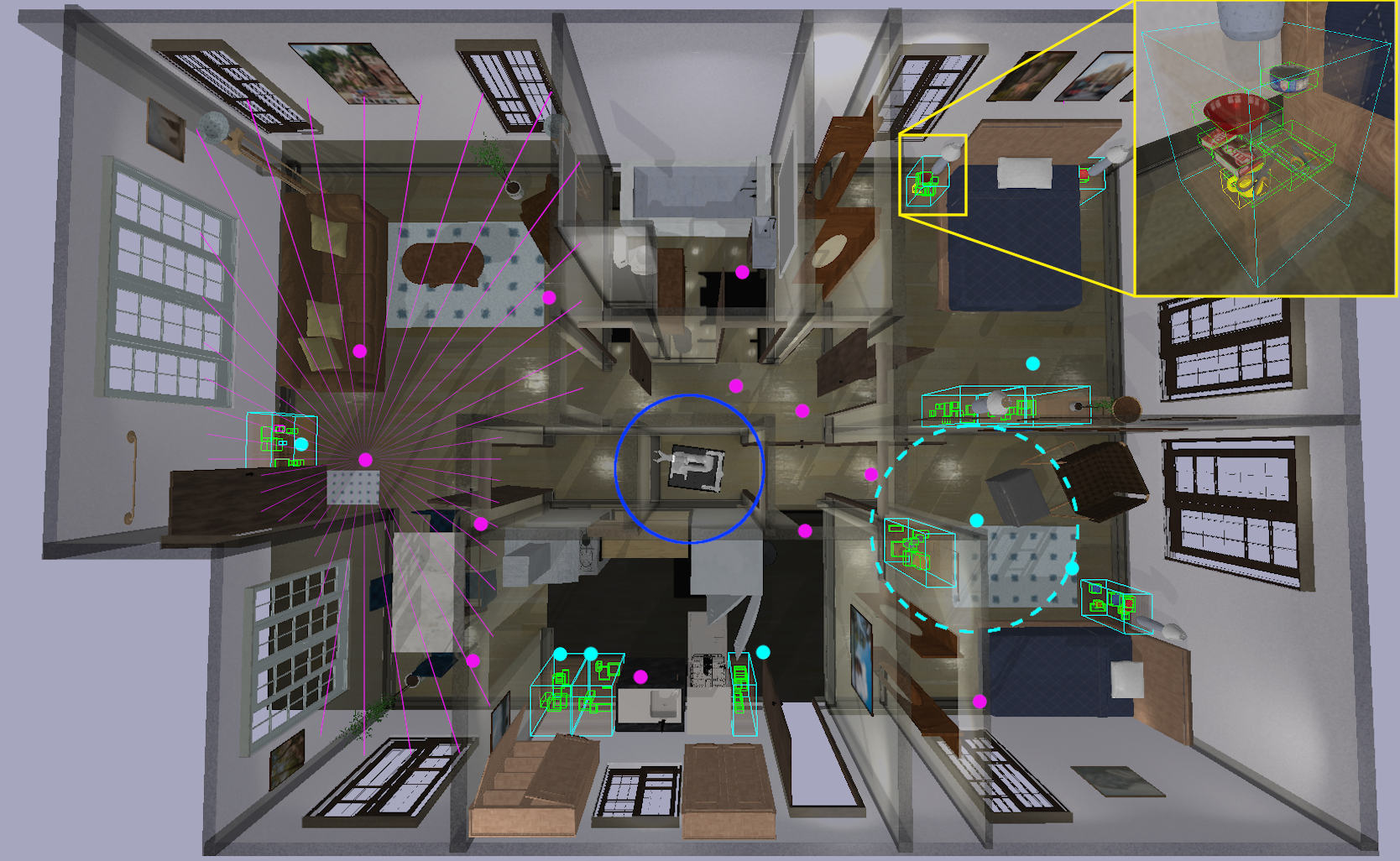
Optimal Hierarchical Planner for Object Search in Large Environments via Mobile Manipulation
Yoonyoung Cho, Donghoon Shin, Beomjoon Kim
International Conference on Intelligent Robots and Systems (IROS) 2022
PDF •